





服务热线
0769-28680919
153-2293-3971 / 177-0769-6579

1 概述
机器视觉就是用机器代替人眼和人脑来做测量和判断。机器视觉系统工作的基本过程是获取目标的图像后,对图像进行识别、特征提取、分类、数学运算等分析操作,并根据图像的分析计算结果,来对相应的系统进行控制或决策的过程。
在很多机器视觉应用中,都需要用到机器视觉测量,即根据目标的图像,来得到目标在实际空间中的物理位置,最典型的如行走机器人、SLAM等。
要根据图像中的目标像素位置,得到目标的物理空间位置,我们需要首先有一个图像像素坐标与物理空间坐标的映射关系,也就是将光学成像过程抽象为一个数学公式,这种能够表达空间位置如何映射到图像像素位置的数学公式,就是所说的机器视觉成像模型,本文即讨论这种模型的机理。
2 小孔成像
机器视觉成像采用小孔成像模型,如下图所示

再次简化为下图

图中X XX是一个空间点,x xx为该空间点在图像中的成像点,C CC为镜头光心(camera centre),从图中可看到,C CC、x xx、X XX三个点是共线的。
光心C CC距离成像面(image plane)的距离即焦距f ff。
后面的各个坐标系及其相互关系都是基于这个小孔成像模型推出。
3 坐标系
说到机器视觉测量模型,就少不了先要了解整个模型中涉及的几个坐标系。
3.1 像素坐标系uov
即图像中各像素点坐在的坐标系,如下图所示uov。

这个坐标系是一个二维坐标系,横坐标为图像宽度方向,纵坐标为图像高度方向,原点位于左上角,坐标轴单位为像素,与图像的像素点对应。







————————————————
版权声明:本文为CSDN博主「寒韩Glory」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/hangl_ciom/article/details/106082794
 FPC点胶宽度视觉检测系统
2025-12-28
FPC点胶宽度视觉检测系统
2025-12-28
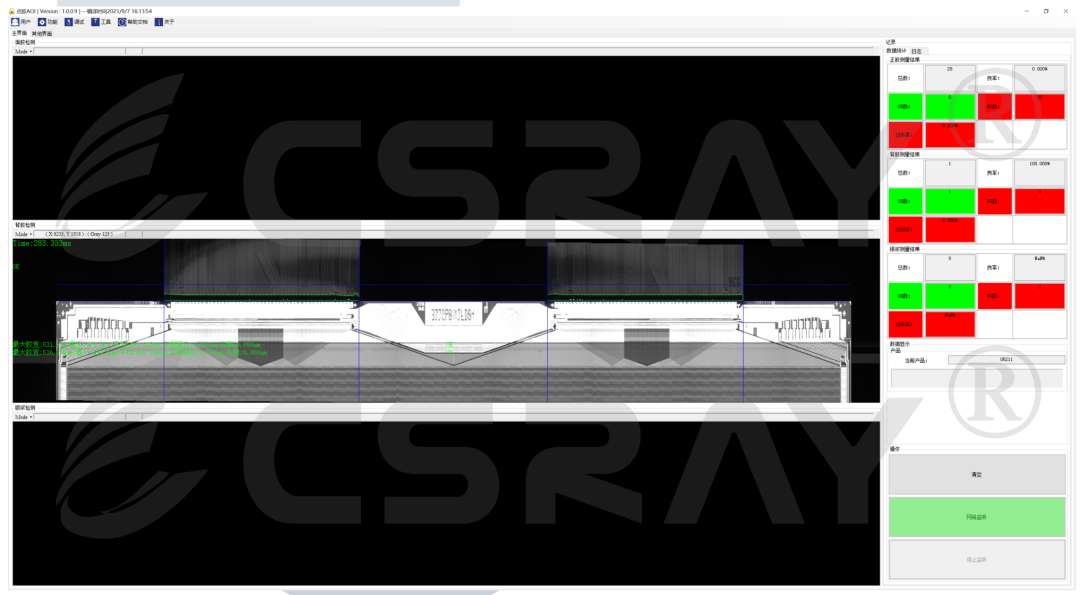
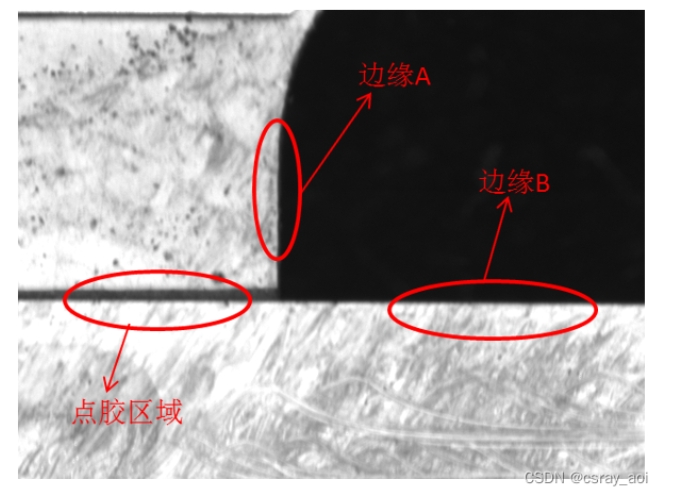
FPC点胶宽度视觉检测系统 属于视觉检测/测量范畴,其核心目的是对点胶工艺的结果(胶路的宽度、高度、连续性、位置等)进行自动化、高精度的量化检测,以确保产品质量和工艺稳定性。
 FPC点胶胶路纠偏视觉系统
2025-12-28
FPC点胶胶路纠偏视觉系统
2025-12-28
该系统旨在解决柔性电路板点胶过程中,因FPC来料位置偏差、治具装夹误差、热膨胀变形等因素导致的点胶路径不准确问题。通过机器视觉实时“看”到FPC上的基准特征,并与预设的“理论位置”进行比对,计算出偏移量(X, Y, θ),然后动态修正点胶头的运动路径,确保胶水精确涂敷在目标位置上。
 康耐德智能FPC胶路阻挡物视觉检测
2025-12-21
康耐德智能FPC胶路阻挡物视觉检测
2025-12-21
康耐德智能FPC胶路阻挡物视觉检测
 FPC点胶表面缺陷视觉检测系统
2025-12-14
FPC点胶表面缺陷视觉检测系统
2025-12-14
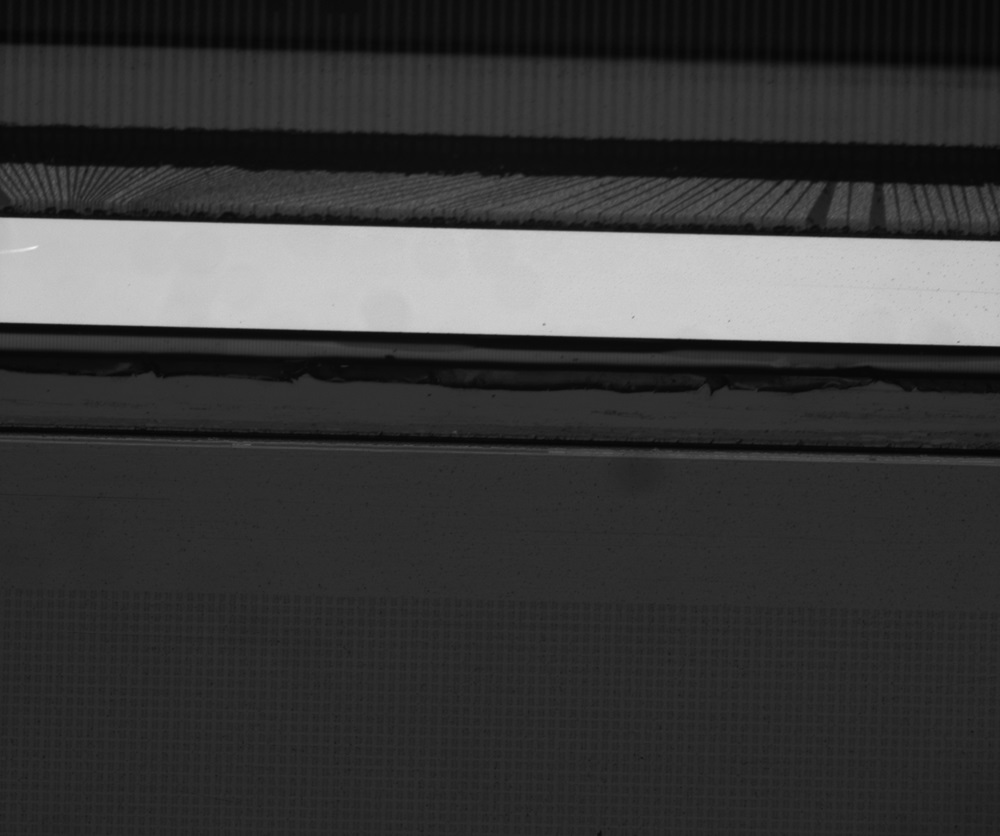
FPC点胶表面缺陷视觉检测系统的核心目标是对点胶工艺后的结果进行自动化、高精度的质量评估,确保胶水的形态、尺寸、位置和连续性符合工艺标准。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 香港2025年六台盒宝典下载版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
